NOAA Teacher at Sea Dieuwertje “DJ” Kast Aboard NOAA Ship Henry B. Bigelow May 19 – June 3, 2015
Mission: Ecosystem Monitoring Survey
Geographical area of cruise: East Coast
Date: May 31, 2015
NOAA Ship Henry B. Bigelow
“National Oceanic and Atmospheric Administration (NOAA) Ship Henry B. Bigelow is the second of five new fisheries survey ships to be built by NOAA. The ship is named after Henry Bryant Bigelow (1879-1967), a Harvard-educated zoologist whose work helped lay the scholarly foundation for oceanography as a scientific discipline. He was an internationally known expert on the Gulf of Maine and its sea life, and on the world’s jellyfish, corals, and fishes” (NOAA NEFSC).
Henry B. Bigelow and the WHOI Mascot goat Buck. Photo by: NEFSC NOAA
Legacy of the name:
Henry B. Bigelow (1879–1967) was an American oceanographer and marine biologist. Bigelow described numerous new species to science, 110 of which are recognized today according to the World Register of Marine Species. In addition, some 26 species and two genera (Bigelowina, stomatopods in family Nannosquillidae, and Bigelowiella, protists in family Chlorarachniophyte) are named after him. The Henry Bryant Bigelow Medal in Oceanography is awarded by the Woods Hole Oceanographic Research Institute to honor “those who make significant inquiries into the phenomena of the sea”. Bigelow was the first recipient of the medal in 1960. He was honored by the naming of NOAA Ship Henry B. Bigelow.
Mission of the ship:
“NOAA ship Henry B. Bigelow will support NOAA’s mission to protect, restore, and manage the use of living marine, coastal, and ocean resources through ecosystem-based management. Its primary objective will be to study, monitor, and collect data on a wide range of sea life and ocean conditions, primarily in U.S. waters from Maine to North Carolina. The region includes Georges Bank, one of the world’s best known and most productive marine areas. The region is also home to the nation’s top-valued port, oldest commercial fisheries, and rare large whales and sea turtles. Data are used by a range of scientists who study variation in ocean conditions and sea life in order to better inform the nation’s decisions about both using and sustaining the ocean’s bounty.
“Henry B. Bigelow will also observe weather, sea state, and other environmental conditions, conduct habitat assessments, and survey marine mammal and marine bird populations. Henry B. Bigelow is a state-of-the-art research ship with multiple science mission capabilities. Foremost among these capabilities is the ship’s “quiet” hull, a design feature that minimizes sound made by the ship underwater. This allows scientists to use hydroacoustic methods for surveying marine life, and significantly reduces changes in the natural behavior of animals owing to the ship noise. In addition, the vessel can collect a variety of oceanographic data while marine life surveys are underway, resulting in both richer and more efficiently collected data.” (NOAA NEFSC)
Most of the main deck is reserved for mission functions. The aft working deck provides 145 sq m of open space for fishing and other over-the-side operations, with an additional 33 sq m of deck space at the Side Sampling Station. Space and support connections are provided for a laboratory van on the aft working deck.
Large, easily reconfigurable laboratories are designed to accommodate the varied needs of individual scientific cruises:
Fish/Wet Laboratory 56 sq m (602 sq ft)
Chemistry Laboratory 27 sq m (290 sq ft)
Dry Laboratory 14 sq m (150 sq ft)
Hydrographic Laboratory 9 sq m (96 sq ft)
Scientific Freezer 19 sq m (204 sq ft)
Preservation Alcove 5 sq m (54 sq ft)
Acoustic/Computer Laboratory 46 sq m (495 sq ft)
“Underwater radiated noise has been shown to influence fish behavior, and sonar self-noise can limit the effectiveness of hydroacoustic surveys and other functions. The International Council for Exploration of the Seas (ICES) has established a standard for ships’ underwater radiated noise in order to effectively employ hydroacoustic stock assessment techniques. Henry B. Bigelow has been designed and constructed to meet this ICES noise standard. This reduced noise signature will improve NOAA’s ability to accurately assess fish stocks and to compare standardized data with the international fisheries scientific community. Examples are the propulsion motors, which are specially constructed and balanced to reduce noise and vibration, and the diesel generators, which are mounted on double isolated raft systems. The hull form and highly skewed, five-bladed propeller were carefully designed and tested using U.S. Navy quieting techniques. Pumps, motors, ventilation and piping systems are all designed for low noise, with some critical systems resiliently mounted in the ship. Hull structure is treated in critical areas with special acoustic damping tiles. Airborne noise has been reduced throughout the ship for personnel safety and comfort.” http://www.omao.noaa.gov/publications/bigelow_final.pdf
To summarize that, this ship is so quiet I cannot tell when we are slowing down to 2 knots for bongo or going 11 knots to steam to the next station. It’s amazing.
Bridge:
The bridge is equipped with numerous dedicated systems including:
Hydrographic ES60 SONAR system, and ME70 multibeam system
Dynamic positioning and auto pilot system
X- and S-band Sperry Bridge Master RADARs
Transas ECDIS Navigation system
DGPS receiver
GMDSS communications suite including weather fax, satellite telephone, MF/HF and VHF radios
MTN internet communications system
SCS remote console and master clock display
Doppler speed log and depth sounder
Sperry primary and secondary gyro compass
Nearly all of these systems are solely controlled from the bridge, allowing scientific and operational systems to be totally independent. All scientific and fishing systems can be monitored from the bridge via remote consoles or SCS interfaces.
Layout of the bridge. Photo by DJ KastLaura Gibson charting on the navigational chart. Photo by DJ KastDepth Profiler. Photo by DJ KastMulti-beam bottom sounder. Photo by DJ Kast
Gibson letting me steer the ship. That is fear in my eyes. Photo by Laura GibsonStarboard steering Console that lets you control the ship while the bongos or CTDs are deployed from the side sampling station. Photo by DJ KastRadar with four contacts! Photo by DJ KastElectronic Chart Photo by DJ KastLT Gibson checking on operations in the bridge. Photo by DJ KastControl and status indicator of watertight doors. Photo by DJ KastNavigation Light switches. Photo by DJ Kast
Cool Events on the Ship
Care Package Delivery:
The CO’s friend that is “Rowing for Peace” to Turkey. The CO delivered ice cream, ship hats, and a pineapple. Photo by DJ Kast
Emergency Drills:
The Bigelow values safety and to make sure that everyone knows what to do in an emergency they do quiet a few surprise drills to keep everybody on their toes.
Station card with information on where to go for each person during each of the type of drills that occur on the ship. Photo by DJ Kast
The first one was a Fire Drill and an Abandon Ship Drill on Wednesday May 20th, 2015.
Photo of me in a survival suit after the abandon ship drill was announced. Photo by Megan Switzer
Practicing the PLT gun (Pneumatic Line Throwing Gun): This is a gun that is used to help rescue people who have fallen overboard and it is also used to pass lines to other boats. It has a projectile connected to a long line that can travel far distance and connect an overboard victim to the boat.
Here is a video of it being shot:
A picture of me preparing the PLT gun for launch. Photo by Dennis CareyPhoto by Marjorie Foster.Photo by Marjorie Foster.
Hydrophoning Acoustic Buoys!
While we were on the southern part of Georges Bank, the boat used a Hydrophone and geometry to pick up an Autonomous Multi-Channel Acoustic Recorder (AMAR) mooring in Lydonia Canyon. The ship sent signals to it with the hydrophone and the signals it received back were indications of where to send the boat next.
The application of the Pythagorean Theorem in terms of acoustic sound distances to the buoy to help during retrieval. Oh, the applications of MATH! Photo by DJ KastGeoff Shook preparing to send out messages on the hydrophone to not only find it but also cause it to release to the surface since it was hundreds of meters down. Photo by DJ KastSuccessful retrieval of the acoustic buoy. Photo by DJ Kast
The back of the shirt that the crew and chief Scientist Jerry Prezioso gave me. I’m having everyone sign it so that I can hang it up when I get home. Photo by DJ Kast
All of the crew have been absolutely amazing and have definitely made this the trip of a lifetime. Thank you all so much. -DJ
NOAA Teacher at Sea
Adam Renick
Aboard NOAA Ship Oscar Elton Sette June 12–26, 2013
Mission: Kona Integrated Ecosystems Assessment http://www.pifsc.noaa.gov/kona_iea/
Geographical area of cruise: The West Coast of the Island of Hawaii
Date: Tuesday, June 25, 2013
Weather Data
Current Air Temperature: 77° F
Sea Surface Temperature: 77° F
Wind Speed: 3 knots
Finding the Cetaceans…
In the final days of our research cruise we set out to get an assessment of cetacean activity in the Kona area that we have been studying. In addition to the ongoing active acoustics, CTD and DIDSON sampling, we have added two new tasks to the science team to find as many cetaceans as possible. We have set up a hydrophone, which is a sound recorder that sits in the water and is pulled by the ship, to listen for the clicks, whistles and any other sounds dolphins and whales might make.
For examples of sounds cetaceans make please check out this website. When the sounds from the cetaceans are received the wave frequencies are recorded using some very interesting software that helps us determine the type of marine mammal it is and where it is located. Specifically locating and identifying the cetaceans requires the cooperation of many people and is not necessarily as simple as I am making it sound here.
The recording of a pod of approximately 150 Melon-Headed Whales. Credit: Ali BaylessThe sounds of Pilot Whales. Credit: Ali Bayless
While the acoustics team and the ship’s crew are listening and seeking out the animals we also assist in the effort by making visual observations from the highest deck of the boat called the “flying bridge”. Here one or two people who are in communication with the science team below use binoculars and “big eyes” to visually find and identify marine mammals.
Looking through the “big eyes”
Some of my personal observing highlights of this operation include a sperm whale, a pod of approximately 150 melon-headed whales and smaller pods of spinner dolphins, rough-toothed dolphins, rough-toothed dolphin and pilot whales.
Visual observations of the Melon-Headed Whales. Photo: Chad YoshinagaRough Toothed Dolphins Photo: Ali Bayless
Wrapping Up the Journey…
I cannot express enough gratitude to the members of the science team and the crew of the Sette for making my NOAA Teacher At Sea experience so rewarding. There are so many elements of this trip that are worth pause, reflection and appreciation. My emotions ranged from excitement just being at sea for 15 days and living a lifestyle that is unique and different than my own, the contemplative awe of the vast and complicated ocean ecosystem and the exhilaration when one of its own breaches the surface to give us a peek at it. In the end, I think my greatest appreciation gained along this journey was learning to slow myself down to the pace of nature in order to better observe and understand it.What’s next for me? NASA Teacher In Space… 2014 here I come!
Just kidding (is that even possible?) Until then I guess I should practice my moon-walking on Kilauea crater until I head back to my amazing wife and life in San Diego. Thanks for reading and, whatever you are doing out there in the world today, make a memory.
Weather Data from the Bridge Air Temperature: 28.1C (82F)
Wind Speed: 4.5 knots (5.2mph)
Wind Direction: From the SSE
Relative Humidity: 78 %
Barometric Pressure: 1021.1
Surface Water Temperature: 28.1C (82F)
Science and Technology Log
ROV with labels, photo credit UVP
Rather than fishing for multiple samples of each species from every Marine Protected Area (MPA) we stop at, the scientists opted to use a Remotely Operated Vehicle (ROV) to gather their data. This also allows Stacey Harter and Andy David to get real time footage of the animals that inhabit each dive site as well as a more complete picture of the habitat itself. Not only are we collecting data on the fish, but John Reed and Stephanie Farrington are taking data on all of the invertebrates we see such as sponges, corals, hydroids, crinoids, sea stars, urchins, and lobster. The ROV we are using for this expedition is called the Phantom S2. It weighs about 300 pounds when out of the water with the dimensions of 24 inches in height, 55 inches in length and 33 inches in width. The Phantom S2 uses the tether to power the two ½ horizontal horsepower electric motors and the two vertical 1/4 vertical horsepower motors and has a maximum speed of 2 knots (2.3mph) and because of the length of the tether, is limited to a depth of 1000 feet. The ROV is equipped with a high resolution video camera with a 12x zoom as well as a digital still camera with strobe to collect high quality color images of anything the scientists need for their research. On this cruise we are averaging about 450 still images and about seven hours of video daily. Two lasers mounted at 10 cm wide help the scientists measure specimens without bringing them to the surface.
Setting up the ROV onboard the ship takes about a day. This requires the ROV team of Lance Horn and Glenn Taylor from the Undersea Vehicles Program out of University of North Carolina Wilmington to arrive at least 24 hours in advance of departure so that they can have the ship’s crew load all of the ROV equipment with the crane. From there they set up the components in the dry lab and begin running the tether cables from the ROV, which is located on the deck, to the computer, which is located in the dry lab. We also have to run a line up to our GPS device and our VHF radio that are both installed on the flying bridge, and yet another cable to transfer the digital images to the computer, and the power line for the ROV engines. Once the research gets underway, it is not uncommon for Lance and Glenn to spend as many as 12 hours a day working on preparing for the dive, operating the equipment during the dive, and then processing all of the data after the dive. It is hard work and takes great attention to detail.
The hydrophone gets lowered into the water while the ROV is on a dive.
In order to communicate with the ROV while it is underwater the operators deploy a Trackpoint hydrophone over the side of the ship which must be taller than the hull of the ship, which on the Pisces is over 28 feet tall. This hydrophone picks up the X,Y,Z coordinates from the ROV then uses the data from antenna mounted on the fly bridge of the ship to create GPS coordinates for the ROV.
This information is plotted into the Hypack mapping system and is used by both the ROV driver as well as the bridge of the ship. This helps the officer on deck know what heading the ship needs to be traveling so the ROV driver can maneuver the ROV to where the scientists want to go. Depth is calculated by the delay in time that it takes the hydrophone to get a signal from the ROV.
Lance Horn piloting the ROV
Driving the ROV takes great skill and concentration. Not only do you have to watch the ROV display footage to make sure you don’t run into anything, but you also have to constantly be aware of your heading so you don’t get the ROV too far off course. The tether keeping the ROV in communication with the ship also has to be monitored. Getting the tether wrapped around a rock overhang or part of a mast on a shipwreck is of great concern. If the tether is severed or becomes too entwined, the ROV could be lost. The ROV driver is in constant contact with the crew on the back deck who are watching the tether line as well as the bridge so that any necessary course corrections can be made quickly and efficiently. Having too much tether in the water can also lead to tangling, so the tether is marked in 50 foot increments, which allows the deck crew to know how much of the tether line to feed into the water. On our cruise, the longest the ROV has been below the surface has been 3.5 hours. Because of the intense concentration it takes to drive the ROV, four consecutive hours is the limit that a driver can do in one sitting. If the dive needs to be longer than four hours, Lance and Glenn would trade duties, so if Lance was driving, he would rotate out onto the deck to monitor the tether while Glenn takes over at the controls.
The ROV control console
The ROV requires three consoles of components to operate. The first is the ROV control console. This is where the driver controls the ROV itself. On this panel are the two joysticks that control the movement of the ROV through the water. The joystick on the left controls the up, down and side to side motion. The joystick on the right controls the forward, reverse, as well as left and right. There are also control switches to tilt the camera so that it is hanging vertically within the cage to take pictures of the ocean floor.
The scientists on this cruise want a “bottom” shot every two minutes. This is their way of “collecting” random samples of the habitat while we are making our way along the transect line. There are also controls switches to turn on and off the lights, turn on and off the laser, and to switch over from the video camera to the still camera so digital still pictures can be taken. Directly above the control panel is a flat screen monitor showing the live footage from the ROV so the pilot can see where the ROV is below the surface.
A multibeam image with transect lines is loaded into the Hypack software so the ROV can be navigated to where the scientists need to collect their data.
The middle console has all of the navigation components. There is a GPS unit displaying the coordinates of the ship at all times. It also contains a Trackpoint acoustic tracking system that provides position data for the ROV. This is not only helpful to the driver, but the scientists take waypoints throughout the operation to help them match up the data they recorded while watching the live video feed from the ROV with the still images, and the temperature and depth data taken by a small CTD attached to the ROV cage.
Also on this cabinet is a rackmount computer using Hypack software. The scientists can load the multibeam sonar information and the transect coordinates into the navigation computer. This software gathers and logs information from the ROV as well as other navigational electronics so the driver sees a real time image of where the ROV is in relation to the ship and features of interest on the sea floor. This also gives both the driver and the scientists an idea of where we are in relation to the transect line. If multibeam images were available and downloaded into the navigation computer, the chief scientist can use those to adjust our heading off the transect line if she feels the structures they need to study are on a different heading than originally plotted.
The ROV video console
The third console contains the controls for the digital still camera as well as the digital recording devices. Steve Matthews, part of the science team, has been manning the still photography on this cruise. When the scientists see something they want a close up picture of, they ask the driver to stop the ROV and position it so the still camera can be zoomed in for a close up shot. This will help the scientists to make the proper identification of all of the different species we photographed while on this cruise.
For this research trip, video and still images are all the scientists need to assess the efficacy of the MPAs. The Phantom S2 has other tools that can be used depending on how the scientist needs to collect their data. The ROV can be fitted with a sonar device which can be used to located objects, such as ship wrecks or other lost items, at ranges farther away than the video can see. Scientists can also elect to use the claw for sample collection, a plankton net to gather plankton, and a fish collection suction device.
Personal Log
Myself driving the ROVWe sent styrofoam cups to a depth of 250m. The cup on the right is the original size. As you can see my cup, at left, shrank by more than half.
The bottom of the ocean has such incredible diversity! Before being invited to be a part of this research expedition, I had only read about all of the amazing things we have seen in text books. The ROV has allowed us to travel to depths that are inaccessible to recreational scuba divers and to visit sites that not too many other people have been to. Every day we see different species and habitats. It is interesting to compare areas that are inside the MPAs with those that are outside of the MPAs. Even though each day might seem like we are doing the same thing over and over again, I am anxiously awaiting a glimpse of something that I have never seen before. For each depth we dive to, there is a new set of species and habitat to learn about. The deepest dive we have been on so far this cruise was at the Snowy Wreck MPA at about 25 m (833 ft) below the surface. This location was really cool because there is an old ship wreck here that is full of corals and anemones and all sorts of fish species. We also had a little fun while at the depth and shrunk some styrofoam cups. Stephanie Farrington is an amazing artist and designed these fabulous cups for us each to send down to shrink.
Ocean Careers Interview
In this section, I will be interviewing scientists and crew members to give my students ideas for careers they may find interesting and might want to pursue someday. Today I interviewed Lance Horn and Glenn Taylor, ROV operators from University of North Carolina Wilmington (UNCW).
Lance Horn
Mr. Horn, what is your job title? I am the operations director of the Undersea Vehicles Program at University of North Carolina Wilmington. I started at UNCW in 1985 as part of NOAA’s Underwater Research Center (NURC) as a hard hat diver. In 1987, I joined UNCW’s scuba and ROV program which has now become the Undersea Vehicles Program.
What type of responsibilities do you have with this job? As director, I am in charge of lining up jobs for us, maintaining the budget, and finalizing the contracts from each project. I also pilot and maintain the ROV itself.
What type of education did you need to get this job? I graduated from the Florida Institute of Technology with an Associate’s Degree in Underwater Technologies. In this program, we studied compressors, hydraulics, welding, scuba and underwater photography.
What types of experiences have you had with this job? This job has allowed me to travel all over the world and to see some really cool things under the ocean’s surface. My favorite ROV dive so far was when I went to Antarctica to map the trash dumped at the bottom of Winter Quarters Bay. Before people realized what kind of impact indiscriminately dumping their trash overboard was doing to the habitats on the ocean floor, ships used to come into port at Winter Quarters Bay and dispose of their trash in the ocean. This includes very large items such as 55 gallon drums, fire hoses, conex boxes, and even a bulldozer that fell through the ice! My job was to use the ROV to create a map showing the location of the large objects so that it could be determined if it would be possible to recover these items for proper disposal. As part of this project, we also had to take the ROV outside of the bay to have an undamaged habitat to use as a control variable for comparison with the bay. Outside of the bay was amazing. We were diving under six feet of ice and got to see an environment that not many others have seen, including purple worms, white sponges, and anemone. It was beautiful.
What advice do you have for students wanting a career with ROVs? Not every job requires a four year degree. You can still find a good job doing something you love. I have been successful doing what I do with a two year Associate’s Degree. Florida Institute of Technology was not an easy school. I worked hard to earn my degree.
Glen Taylor
Mr. Taylor, what is your job title? I am an ROV pilot and technician with the Undersea Vehicles Program and UNCW.
What type of responsibilities do you have with this job? In addition to piloting the ROV, my primary responsibilities are to maintain the three console units that house all of the digital equipment we need to control the ROV. This includes any rewiring that needs to be done or the replacement of equipment either for repairing broken parts or upgrading to newer electronics.
What type of education did you need to get this job? I earned my Bachelors Degree from Clarkson College of Technology. I went to work for General Electric in New York. I was transferred to GE in Florida after which I decided to retire from GE and become a scuba dive master. I went to work for NURC in St. Croix but was transferred to UNCW when the St. Croix office was closed. This is where I hooked up with Lance in 1993 and learned to operate the ROV.
What types of experiences have you had with this job? I have also been fortunate enough to travel the world with the ROV. Diving at the Edisto MPA this week is probably the highlight of my career in ROV operation. The reef features were fantastic, the water was clear, we had hardly any current, the ship was able to remain on course. It was perfect conditions.
What advice do you have for students wanting a career with ROVs? First and foremost, follow your passion. What do you get excited about? I have been driving ROVs for almost ten years and I still love coming to work each day. To be successful in this field, you need a strong background in computers and technology. You can be trained to drive the ROV, but strong technology skills are essential. Another good skill to have is problem solving and trouble shooting. Things might go wrong in the middle of a dive, you have to be able to figure out a solution right there on the spot to keep the dive going.
NOAA Teacher at Sea
Chris Faist Aboard NOAA Ship Henry B. Bigelow July 20 — August 1, 2011
Mission: Cetacean and Seabird Abundance Survey Geographical Area: North Atlantic Date: July 24, 2011
Weather Data Air Temp: 23 ºC
Water Temp: 21 ºC
Wind Speed: 11 knots
Water Depth: 35 meters
Science and Technology Log
Bottlenose Dolphin bowriding
Continuing our quest to count mammals and seabirds has brought us to shallower waters. Currently we are moving in an area south of Martha’s Vineyard. In this area we have had better visibility allowing us to sight species like the south polar skua and bottlenose dolphin. Increased sightings bring new equipment and tools utilized by scientists to give a clearer picture of the diversity of animals in our survey area.
South Polar Skua
In addition to seeing animals through binoculars, scientists also want to learn about animal genetics and vocalizations. Specialized equipment like a crossbow loaded with a biopsy dart or a towed hydrophone array can give scientists greater insight into the animals they are trying to study.
Pete ready to take a biopsy sample
Pete, one of the marine mammal observers is also tasked with using a crossbow and biopsy dart to take a small sample of whale or dolphin tissue. When the visual sighting team (using binoculars) spots an animal, they direct the bridge (where the ship is controlled) to steer the ship toward the animal or group of animals. At this point, Pete begins to prepare his genetic sampling equipment. On the bow of the ship are two raised platforms, one on each side. With his crossbow in hand Pete harnesses himself to the ship, climbs on a platform and loads a biopsy dart. If the animals are close enough he will then fire the dart, which is tethered to the ship, and collect a very, small piece of skin and blubber from the animal. This tissue sample can be used by scientists to study the animal’s DNA, sex, health, diet, pollution levels and in females, check for pregnancy.
Crossbow loaded with biopsy dart
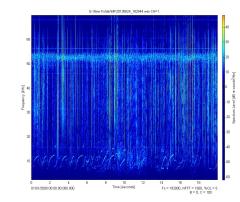
Another tool used to deepen a scientist’s understanding of marine mammals is a towed hydrophone array. Included in a thin tube towed behind the ship are underwater microphones or hydrophones. These are used to listen to noises in the ocean but for this cruise, the hydrophones are tuned to pick up sounds made by marine mammals.
One of the problems associated with using visual sightings to count marine mammals is they only spend a short period at the surface where they can be visually observed. To ensure that all animals are counted, scientists like Rob and Sandra listen for animals that may be underwater when the ship passes. Using multiple hydrophones they can use computer software to locate the noises and note the presence of animals that may be missed by visual observers.
Personal Log
Today was our first day of good weather that lasted all day. What that means is 12 hours on deck looking for animals. Even though I can take a break whenever I need it, I am worried that if I leave the deck I will miss something interesting. After that many hours on deck it is great to get some dinner and head for bed. I have been sleeping really well, making getting up at 6am to start surveying almost enjoyable.
Next posting I will talk about the CTD/Bongo sampling device that I am helping to deploy every day at lunch.
NOAA Teacher at Sea
Chris Faist Aboard NOAA Ship Henry B. Bigelow July 20 — August 1, 2011
Mission: Cetacean Abundance Survey Geographical Area: North Atlantic Date: July 14, 2011
Personal Log
My name is Chris Faist and I am a NOAATeacher At Sea participant for the 2011 field season aboard NOAA Ship Henry B. Bigelow. I teach middle school life science in southern California at Carmel Valley Middle School. In a few days I will be traveling from Rhode Island to the coastal waters off the east coast to experience the North Atlantic for the first time.
I have been assigned to a cetacean (whale and dolphin), sea turtle and seabird survey cruise in the North Atlantic. The cruise objectives are to:
1) determine the distribution and abundance of cetaceans, sea turtles and sea birds within the study area;
2) collect vocalizations of cetaceans using passive acoustic arrays;
3) determine the distribution and relative abundance of plankton;
4) collect hydrographic and meteorological data;
5) when possible, collect biopsy samples and photo-identification pictures of cetaceans.
Chris Faist with a Gray Whale
As the trained observers look for animals, my job will be to record their observations in a computer system. They will be reporting what species they see, the approximate number and location of the animals which I will then input into the ship’s computer. These observations, as well as the recordings taken from our underwater microphone, or hydrophone, will allow scientists back in the lab to estimate the number of animals that live off the east coast of the United States.
All of my previous boat trips have been in the Pacific Ocean, so this cruise will give me an opportunity to see whales, like the North Atlantic Right Whale, that I have never seen before.













































{kind=link}